
真的,别不把办公桌当回事。
我以前也不信这些,直到有段时间,座位正对着门。
每天上班,只要有人进出,余光就会闪一下,心就跟着晃一下。

一天下来,没干什么体力活,但累得要死,脑子里像灌了铅。
过了一阵子,有一位资历深厚的前辈途经此地,不经意间冒出这么一句话:“你所处的这个位置,是不是恰似处于风口之上却仍在顽强硬撑呀?”。
之后,我查阅了极多的资料,同时呢,还观察了那些在职场中境遇较好的同事所占据的座位,最终发觉,事实绝非如同所谓玄学那般轻易简单呀。
办公桌直冲大门,烦躁吗?

直冲大门,其实不只是“气场冲”的问题。
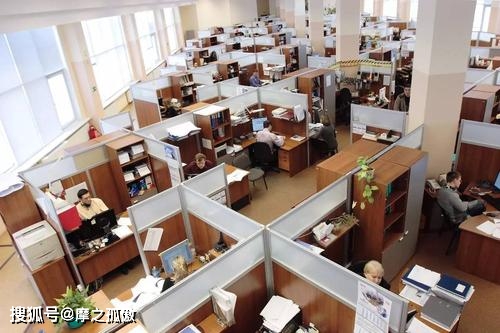
你试想一下,那扇大门可是整个办公区域里,最为繁忙的动态行进路线所在之处,有着脚步发出的声响,人们交谈时产生的声音,以及开关门时发出的声音,你的耳朵以及眼睛呀,被迫去接纳所有的这些信息。
在潜意识当中,你的神经始终都处于紧绷的状态,时刻防备着,下一个即将进来的人,是否会对你造成惊吓呢,那可是不一定的哟。
这种状态下,不暴躁才怪 。
领导如果坐这个位,威严尽失;员工坐这个位,心神不宁。
如果实在没办法躲开,那么就在桌子跟门的中间位置,放置一盆较为高大的绿植,或者竖立一个小型的屏风,以此略微遮挡一下那道“径直吹来又径直吹去的风”。

背对大门而坐,招小人?
这个我真的深有体会。
背后存在着门,或者也有过道,要是有人从那里走过,就算不回过头去,后脑勺也会产生感觉。
那种感觉就像……有人在暗处盯着你,但又不知道是谁。
风水上说这叫“无靠山”,心理学上说这叫“缺乏安全感” 。
长时间处于这般位置,人会变得满心狐疑,对于决策踌躇不定,并且真的极易毫无缘由地得罪他人,也就是人们常说的“犯小人”。
于是,座位的后部最适宜是墙,是柜子,是那种稳稳当当、不会产生移动的依靠。

头顶横梁压顶,压力大吗?
要是你的座位上边存在一根凸出来的横梁,那种感觉仿佛头上悬吊着一把剑。
说实话,就算你不信风水,每天坐在那,心理上也会有压迫感。
尤其是那种较为低矮的横梁,会致使空间呈现出压抑之感,人的手脚因此自然无法顺畅伸展、自由自如,大脑思维进而也会遭受限制、受到束缚。
思考问题时,总会感觉难以想得透彻,所拟定的方案,总要被退回来不行,或许就是这“梁”在暗中搞鬼。

马年(2026年)的煞位,注意了!
既然是马年,咱们就得讲讲流年。
今年是丙午年,三煞位在北方(亥、子、丑方位) 。
必须要对这个格外留意,要是你的办公桌恰好处于公司的北面方位,又或者你所坐的朝向面向北方,那么在今年之时,极有可能会察觉到格外的不顺畅,极易遭遇口舌方面的是非情况,甚至会出现毫无缘由的财物损耗情况。
况且,以今年现况而言,有利的方位乃是属于太岁方的南方;将办公桌迁移至南边之处,或者朝着南边的方向进行工作;听说这样一来能够借助到太岁的力量哩,进而使得事业发展能够更加顺遂那么些许。
高层的单独办公室,真的有必要吗?
很多人都羡慕高管有独立办公室,觉得那是身份的象征。
其实,那不仅仅是面子问题。
独立的房间,确实能“藏风聚气” 。
外面的大办公室气场太杂,人来人往,生气刚聚起来就被冲散了。
然而,独立办公室具备将那些良好能量予之稳固安定的能力,致使于身处其中的人,其头脑会更为清晰,思考会拥有更深层次。
这不是特权,这是决策质量的保障 。
属相相冲,避开就好。
这个比较简单,但也很容易被忽略。

假设你是属鼠的,那么就尽可能不要将办公桌放置在正北方(子位);要是属牛的话,就要避开通向东北方向的区域(丑位)。
这是基本的方位避忌。
此外,办公室之中最为尊贵的那个方位乃是西北方,在八卦里面对此称作乾位,其代表着权力以及领导。
假使这个方向位置跟你上司的生肖不存在抵触冲突这般情况情形,将上司办公的屋子设置在那里之处,公司通常常常往往能够发展得相对较为平稳妥当。
前方有人面对面,尬不尬?
你有没有和同事面对面坐过?
那真的太难受了。
一抬头就四目相对,不说话显得生分,说话又耽误工作 。
想伸个懒腰都觉得有人在看你,完全没有隐私。
这种格局,风水上叫“心理煞”,会让你分心,工作效率低下 。
较好的办法是,在两位人员之间放置些文件格,或者摆放小盆栽,进而分隔出来一道可以起到视线遮挡作用的屏障。
座位靠墙太近,憋屈吗?
如果座位离墙太近,眼睛看不到远处,会有一种被困住的感觉。
为了能捕捉信息,人眼是需要开阔视野的,要是眼前仅仅是一堵墙,潜意识当中就会觉得自身被围困了,进而容易产生焦虑跟不安。
一定要给自己留出一点“明堂”,也就是桌前的缓冲区。
座位旁有水龙头,运势反复?

办公室的水龙头、洗手台,甚至是饮水机,都要尽量离远点 。
水能聚气,也能扰气。
水流动的地方,气场是不稳定的。
身处这般所在之际,人的情绪极易产生波动,运势也会同之呈现忽上忽下之态,今日状态极佳,明日却萎靡消沉,极难维持一种平稳的节奏啊。
背后是门或走道,能集中精神吗?
再次强调,背后一定要有靠!
人的后脑勺对背后的动静最敏感,这是刻在基因里的生存本能 。
即便是背后有人开始行进,就算你故意不去瞧看,大脑也必定会分出一部分精力来进行“监听”。
一天下来,能量就这么白白消耗掉了。
因此,不论那个高背椅,还是于其后面放置一个柜子,务必得将“靠山”给切实做好。
电脑主机、复印机后面,小心磁场。
这个有点现代风水的意思了。
针对那些体积较大的电器,尤其是老式的复印机以及电脑主机而言,当它们开始运转的时候,就会产生出相对比较大的磁场,并且还会散发出一定的热量。
长期紧挨着它们坐,会让人烦躁,甚至头晕。
这不是迷信,是实实在在的物理影响。
正对厕所门,能忍吗?
最不能忍的就是座位正对厕所门。
那味道……我就不多说了。

秽气是看得见闻得着的,就算门关着,心里也膈应。
徜若确实毫无办法可想,那用于排泄之所的门务必要始终保持闭合状态,其间还要摆放上高大且枝叶繁茂的绿色植物,能遮挡一分是一分。
归根到底,办公桌的放置,实质上而言,乃是一场围绕着“舒适感”以及“掌控感”所展开的较量。
不用把每一条都视作圣旨,然而要是有一天你上班时常常觉得疲惫、烦闷、杂乱,不妨低下头瞧瞧你的桌子,是不是恰好触犯了其中一条呢。
身体的感觉,不会骗人。
稍微挪动一下,哪怕只是十厘米,气顺了,人也就顺了。
Comments NOTHING